2.5: Zusammenfassung: Was ist ein Roboter?
| Autoren: | |
| Publikation: | 5.10.2016 |
| Lernstufe: | 2 |
| Übersicht: | Die Schüler:innen haben sich mit dem Kobold auf seinem Gitter und/oder mit Thymio befasst und können nun definieren, was ein Roboter ist: Eine Maschine, die mit ihrer Umgebung interagieren kann. |
| Angestrebte Kenntnisse: |
|
| Wortschatz: | Sensor, Motor, Computer, Roboter |
| Dauer: | 45 Minuten |
| Material: |
Für die Klassen, die mit Thymio gearbeitet haben: Für den Lehrer:
Für die Schüler:innen:
|
| Herkunft: | La main à la pâte, Paris |
Vorbemerkung
Diese Unterrichtsstunde kann entweder am Ende der Unterrichtseinheit 1 (Das Spiel mit dem Kobold) durchgeführt werden oder am Ende der Unterrichtseinheit 2 (Mit einem Roboter spielen). Während die Schüler:innen in der zweiten Unterrichtseinheit mit einem echten Roboter herumhantiert haben, haben sie in der ersten Unterrichtseinheit lediglich einen fiktiven Roboter (eine Spielfigur) durch ein Labyrinth (über ein Gitternetz) laufen lassen. Diese Unterrichtsstunde besteht aus drei Teilen:
- einem Übergang für die Schüler:innen, die nur die erste Unterrichtseinheit durchgenommen haben,
- einem Übergang für die Schüler:innen, die (auch) die zweite Unterrichtseinheit durchgenommen haben,
- einem gemeinsamen Teil, in dem die Schüler:innen zu einer Definition eines Roboters kommen.
Übergang von der Unterrichtseinheit 1 (Das Spiel mit dem Kobold)
Ausgangssituation
Die Schüler:innen haben Programme geschrieben, mit denen sie eine Spielfigur (einen Kobold) über ein Gitternetz haben wandern lassen. Dabei musste die Spielfigur Goldmünzen einsammeln und Gespenstern ausweichen. Der Lehrer lässt die Schüler:innen darüber debattieren, was man machen müsste, wenn der Weg, den der Kobold nehmen soll, zunächst unbekannt wäre, er sich also in einem Labyrinth befände. Was müsste man tun, damit der Kobold aus dem Labyrinth herausfindet, ohne dass man ihm jedes Mal sagen muss, was er tun und wohin er gehen soll.
Diskussion über Sensoren, Motoren, Programme
Die Schüler:innen können den Begriff "Test" reaktivieren. Mit Bedingungssätzen kommt man einer Lösung des Problems schon nahe: WENN vor dem Kobold ein Hindernis auftaucht, DANN soll er nach rechts gehen.
Die Frage, sie sich daraufhin sofort stellt, ist: "Woher weiß der Kobold, dass dort ein Hindernis ist?". Wenn die Schüler:innen nicht sofort auf die Antwort kommen, kann man Hinweise geben: Wie findet ein Hund aus einem Labyrinth heraus? Oder ein Mensch? Er benutzt seine Sinne: den Sehsinn, den Geruchssinn, den Tastsinn. All das führt zum Begriff der "Sensoren". Es gibt Audiosensoren, optische Sensoren, Geruchssensoren (auch olfaktorische Sensoren genannt), Tastsensoren (auch taktile Sensoren genannt). Der Test, der die Farbe der Schatztruhe abfragt ("Ist die Schatztruhe grün?"), bekommt die gewünschte Information von einem optischen Sensor. Hindernisse lassen sich also mit Sensoren detektieren.
Gemeinsame Erörterung
Die Klasse fasst zusammen: Mit Sensoren kann der Kobold seine Umgebung wahrnehmen. Mit einem Programm kann man dem Kobold sagen, was er in dieser oder jener Situation machen soll.
Der Lehrer fragt anschließend, was der Kobold bräuchte, um sich selbstständig zu bewegen. Die Schüler:innen diskutieren darüber und kommen zu dem Schluss, dass er entweder Beine und Muskeln bräuchte oder einen Motor und Räder.
Der Lehrer stellt eine letzte Frage: "Wie nennt man Gegenstände oder Apparate, die Sensoren, einen oder mehrere Motoren und Programme haben?".
Übergang von der Unterrichtseinheit 2 (Mit einem Roboter spielen)
Ausgangssituation
Der Lehrer kommt mit einem ausgeschalteten Thymio in die Klasse. Die Schüler:innen sollen Vermutungen anstellen, wie ein Thymio von innen aussieht. Sie nennen wahrscheinlich die Teile, die (teilweise) von außen sichtbar sind: Sensoren, Räder. Um ihnen auf die Sprünge zu helfen, stellt der Lehrer Fragen.
- Was bewirkt, dass sich Thymios Räder drehen?
- Woher kriegt Thymio seine Energie her, um sich fortzubewegen und seine ganzen Lämpchen zum Leuchten zu bringen?
- Braucht er Benzin oder sollte man ihn füttern?
- Woher weiß er, in welche Richtung er fahren soll, wenn er auf ein Hindernis stößt?
Beobachtung: Wie sieht ein Thymio von innen aus? (alle zusammen)
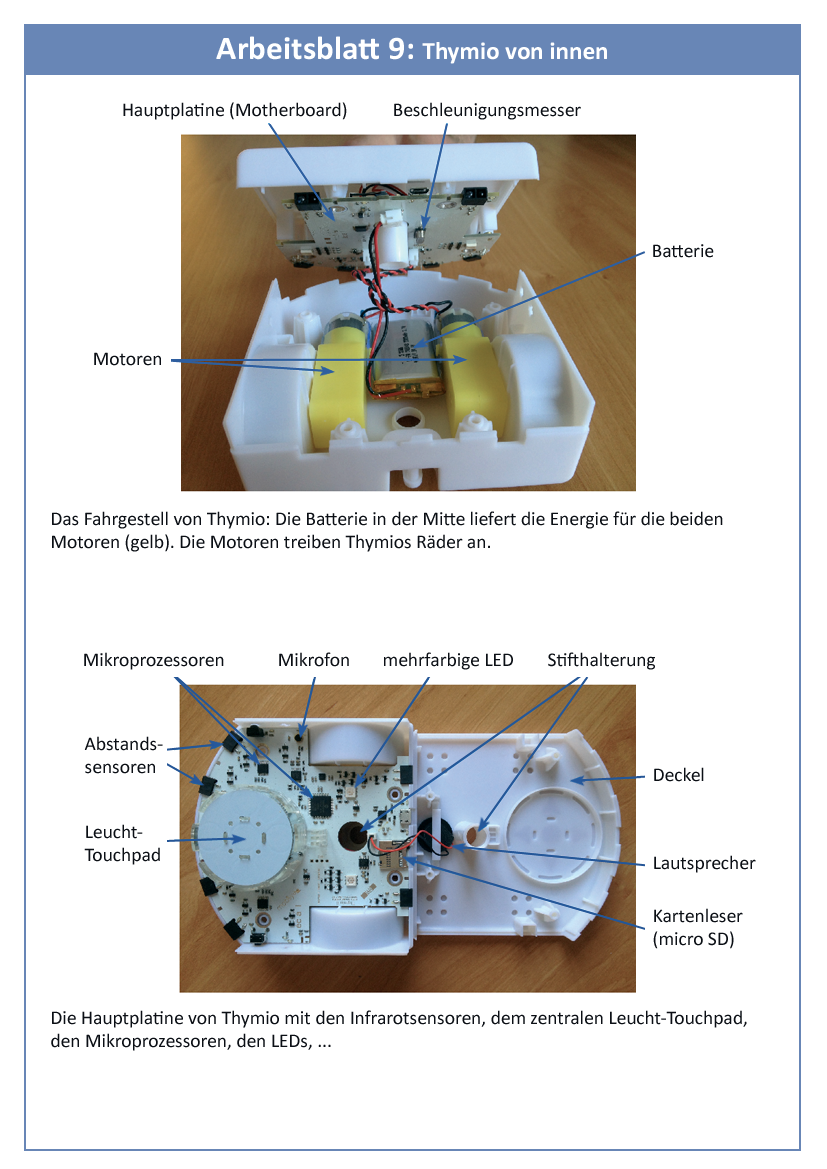
Der Lehrer löst ein paar Schrauben und öffnet Thymio. Er achtet darauf, dass die Schüler:innen nur schauen und nichts anfassen, da Thymio im geöffneten Zustand leicht kaputtgehen kann. Der Lehrer zeigt auf die verschiedenen Bestandteile und benennt diese (dafür kann er das Arbeitsblatt 9 (Thymio von innen) zu Hilfe nehmen):
- Die Sensoren und die roten Lämpchen, die aufleuchten, wenn Thymio etwas detektiert.
- Die Kabel, die die Sensoren mit kleinen, schwarzen, viereckigen Teilen (Mikroprozessoren) verbinden. Die Mikroprozessoren dienen Thymio als Computer. Sie "sagen" ihm, was er machen muss, wenn ein bestimmter Sensor angesprochen hat.
- Die mehrfarbigen LEDs, die Thymios Farbe in den verschiedenen Betriebsmodi bestimmen.
- Die beiden mit den Rändern verbundenen Motoren, die den Befehlen der Mikroprozessoren gehorchen.
- Der aufladbare Akku, der Thymio mit Energie versorgt.
Pädagogische Anmerkung
Wenn die Schüler:innen die Unterrichtseinheit 1 (Das Spiel mit dem Kobold) nicht durchgenommen haben, werden sie die Bedeutung der Mikroprozessoren und/oder des Programms nicht nachvollziehen können. Sie haben beobachtet, dass der Roboter sich mit Hilfe seiner Räder fortbewegt und Sensoren besitzt, um Hindernisse wahrzunehmen. Den Schüler:innen fehlt aber der Zusammenhang: Wo wird interpretiert, wo wird entschieden?
Um das zu verdeutlichen, kann ein Schüler:in den Roboter spielen. Man gibt ihm Anweisungen und er gehorcht, ohne Fragen zu stellen. Man befiehlt ihm zum Beispiel geradeaus zu gehen. Er wird losmarschieren, die Wand auf sich zukommen sehen, und beunruhigt auf einen weiteren Befehl warten. Bevor er gegen die Wand stößt, wird er von selbst stehenbleiben. Man kann ihn daraufhin fragen, weshalb er nicht gehorcht hätte. Er kann antworten, dass seine Augen die Wand gesehen haben und sein Gehirn den Beinen befohlen hat stehenzubleiben (damit er sich nicht verletzt). Die Funktion, die hier das Gehirn des Schülers oder der Schülerin hatte, führt im Roboter der Computer aus.
Zusammenfassung: Was ist ein Roboter?
Der Lehrer verteilt die Arbeitsblätter 10 (Roboter – Teil 1) und 11 (Roboter – Teil 2) . Die Schüler:innen sollen in einem ersten Schritt die verschiedenen Objekte sortieren. Die Anzahl der Kategorien ist ihnen selbst überlassen. Normalerweise sortieren sie instinktiv alle humanoiden Roboter in eine Gruppe ein, die nicht humanoiden in eine andere. Manchmal sortieren sie aber auch nach Farben oder nach Formen.
Sind die Schüler:innen mit dem Sortieren fertig, händigt der Lehrer ihnen ihre Roboterzeichnungen aus, die sie in der Unterrichtsstunde 2.1 (Thymio, der Roboter) gezeichnet haben.
Die Schüler:innen stellen letztendlich fest, dass all diese Objekte Roboter sind. Trotz ihrer sehr unterschiedlichen Form besitzen sie alle Sensoren, Motoren und Computer. Sie sehen alle unterschiedlich aus, funktionieren aber alle auf ganz ähnliche Weise. Man kann einen Roboter also folgendermaßen definieren:
Ein Roboter ist eine Maschine, die Sensoren, Motoren und einen Computer besitzt. Ein Roboter kann seine Umgebung wahrnehmen und auf diese einwirken.
Pädagogische Anmerkung
Man kann mit den Schüler:innen darüber sprechen, dass man meistens voreingenommen ist, wenn man einen humanoiden Roboter sieht. Man geht sofort davon aus, dass dieser besonders "intelligent" ist. In Wirklichkeit kann er meistens nicht viel mehr als ein Staubsaugerroboter.
Wissenschaftliche Anmerkung
Was ist der Unterschied zwischen einem Automaten und einem Roboter? Diese Frage stellt sich uns Erwachsenen womöglich, wenn wir eine Werkzeugmaschine sehen. Früher wurden diese so programmiert, dass sie eine Bewegung immer wiederholt haben. Das war ein Automat, kein Roboter. Ein Automat führt immer wieder die gleichen Bewegungen aus ("Beuge deinen Arm im 45-Grad-Winkel", "Bringe den Bohrer nach unten", "Bohre ein 5 cm tiefes Loch", "Bringe deinen Arm 45 Sekunden lang in eine gerade Position"). Ein Automat besitzt keine Sensoren. Wenn der Arm der Maschine klemmt, wird die Maschine trotzdem versuchen, die anderen Befehle auszuführen (dann wird das Loch in die Luft gebohrt). Heutzutage ist ein Roboterarm ein Roboter (wie der Name schon sagt). Ein Drucksensor bestätigt, dass der Bohrer auf dem Blech ist, in das ein Loch gebohrt werden soll. Eine Füllstandanzeige zeigt, dass noch genug Öl in seinen Gelenken ist, Servomotoren kontrollieren die Position des Roboterarms ... und ein Programm sagt ihm, wie er sich anpassen bzw. stoppen muss, wenn sich etwas verändert. Viele technologische Geräte sind inzwischen Roboter. Wenn der Toaster das Brot auswirft, bevor es verbrennt, hat er Sensoren und ein Programm.
Besondere Eigenschaften der Roboter, die in den Arbeitsblättern 10 und 11 abgebildet sind:
- DelFly ist ein selbstständig fliegendes Micro Air Vehicle, eine mit einer Kamera ausgerüstete Minidrohne.
- Sojourner gehört zu einer ganzen Reihe von Forschungsrobotern, die gebaut wurden und werden, um Planeten und andere Himmelskörper unseres Sonnensystems zu erforschen.
- Roomba ist ein Staubsauger, der selbstständig einen Raum staubsaugt und seine Akkus wieder aufladen geht, wenn diese leer sind. Sein Verhalten erinnert sehr an Thymios gelben Betriebsmodus.
- Die EPOROs verhalten sich wie Fische in einem Fischschwarm: Sie bewegen sich gemeinsam, weichen Hindernissen aus, ohne mit ihresgleichen zusammenzustoßen. Die EPOROs sollen demonstrieren, dass man selbstfahrende Autos bauen kann, die auf vollen Straßen fahren können, ohne Unfälle zu verursachen.
- Die programmierbaren Roboterarme von Industrierobotern werden eingesetzt, um eine große Anzahl von identischen Werkstücken (zum Beispiel Autos) zu bearbeiten (schweißen, schneiden, bohren, ...) und zusammenzubauen. Dies geschieht meistens am Fließband oder in der Montagestraße. Roboterarme besitzen Sensoren, u. a. um die Genauigkeit ihrer Bewegungen zu überprüfen oder den Füllstand von Verbrauchsflüssigkeiten (Öl, Wasser) anzuzeigen.
- Thymio ist ein Schulroboter.
- Der Roboter Baxter erkennt bestimmte Formen wieder und kann die entsprechenden Teile von einem Förderband aufsammeln und an eine andere Stelle platzieren.
- Albert Hubo ist ein humanoider Forschungsroboter, der sich auf zwei Beinen fortbewegt. Seine Gestik und Mimik zeigen Emotionen, beim Sprechen bewegen sich seine Lippen.
- Honda P2 war der erste selbstständig laufende humanoide Roboter. Er hat überall zahlreiche Sensoren und am Kopf eine Kamera.
- BigDog ist ein vierbeiniger Laufroboter, der aussieht wie ein Esel. Er kann schwere Lasten tragen und kommt auch auf unebenem Terrain voran.
Gemeinsame Erörterung
Um die Besonderheiten eines Roboters zu betonen, kann der Lehrer die Schüler:innen auffordern, Roboter mit Tieren zu vergleichen.
- Die Sensoren entsprechen Sinnesorganen (Seh-, Gehör- und Tastsinn).
- Die Motoren entsprechen den Muskeln.
- Der Computer funktioniert ähnlich wie das vegetative Nervensystem.
- Seine Bestandteile entsprechen einzelnen Teilen des Tierkörpers.
Zusammenfassung
Die Schüler:innen fassen zusammen, was sie in dieser Unterrichtsstunde gelernt haben.
Beispiel: Thymio besitzt einen Computer, Sensoren und Aktoren (Motoren, Lautsprecher, LEDs).
Mögliche Erweiterung
Die Schüler:innen können nun erneut einen Roboter zeichnen. Viele werden abermals einen humanoiden Roboter zeichnen. Werden sie auch Roboter zeichnen, die wie Thymio aussehen?
Die Schüler:innen können darüber debattieren, ob Maschinen intelligent sind. Was können sie, was können sie nicht?
Letzte Aktualisierung: 22.7.2025





{kind=link}
{kind=link}
{kind=link}